Automotive ECU Testing: How CAN Bus Tools Accelerate Validation
01 July 2026
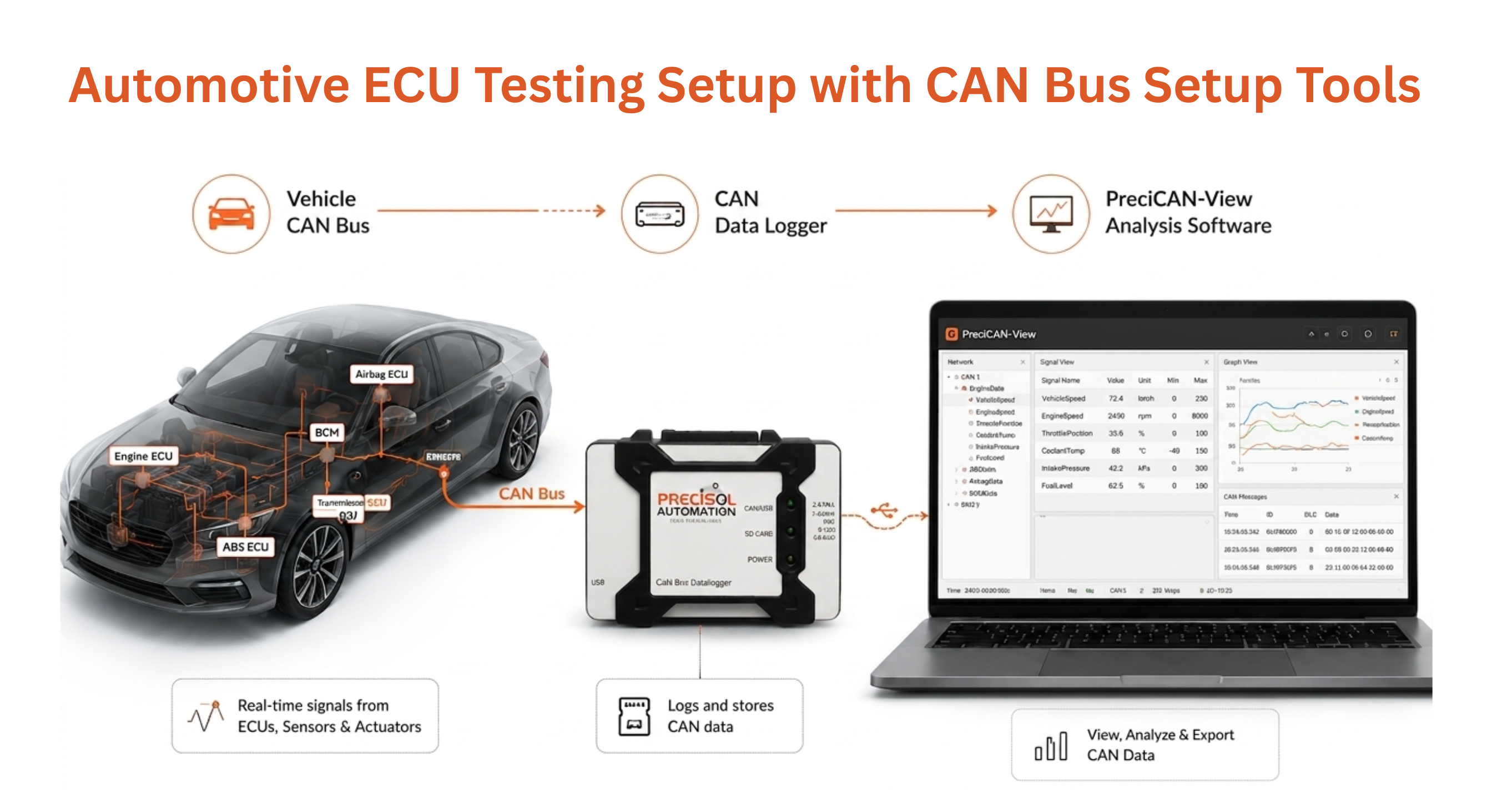
Automotive ECU testing is the structured process of verifying that an Electronic Control Unit's software behaves correctly across all required operating conditions before a vehicle enters production. Modern vehicles contain 50 to 150 ECUs — each managing a critical function from engine control and ABS to airbag deployment and infotainment — and every one of them must pass rigorous ECU software validation before sign-off. The primary communication channel for this validation is the CAN bus, and dedicated CAN bus testing tools are what allow automotive ECU testing teams to stimulate, monitor, and verify ECU behaviour at the speed and scale that modern development cycles demand.
The Automotive ECU Testing V-Model
Automotive ECU testing is structured around the V-model, a development and validation framework defined in standards including AUTOSAR and ISO 26262. Each stage of automotive ECU testing has specific tool requirements, and CAN bus testing tools become progressively more important as the process moves from simulation to real hardware:
- Model-in-the-Loop (MIL): The control algorithm is tested entirely in simulation. No CAN bus testing tools are required at this stage — validation is mathematical. This is the first gate in automotive ECU testing.
- Software-in-the-Loop (SIL): Compiled ECU code runs in a PC environment with simulated inputs and outputs. Basic CAN bus testing tools can inject test messages and observe responses during ECU software validation at this stage.
- Processor-in-the-Loop (PIL): Code runs on the target microcontroller but with simulated plant signals. CAN bus testing tools are used to stimulate the ECU's CAN interfaces and verify signal processing in automotive ECU testing.
- Hardware-in-the-Loop (HIL testing): The real ECU connects to a real-time simulator that models the physical plant (engine, brakes, sensors). HIL testing is the most comprehensive stage of automotive ECU testing — CAN bus testing tools inject realistic CAN traffic patterns, fault conditions, and edge cases that would be dangerous or impractical to create in a real vehicle.
Key CAN Bus Testing Tools for ECU Software Validation
Effective automotive ECU testing requires a toolchain assembled around the CAN bus interface. The core CAN bus testing tools in a modern ECU software validation setup include:
| Tool Type | Role in Automotive ECU Testing |
|---|---|
| CAN to USB Interface | Physical connection between ECU CAN network and PC for real-time ECU software validation monitoring |
| DBC Signal Database | Decodes raw CAN frames into physical signal values during automotive ECU testing |
| CAN Bus Analyser / Logger | Captures, timestamps, and filters CAN traffic for post-test ECU software validation analysis |
| ECU Simulator | Generates stimulus CAN messages representing sensors, actuators, and network peers in HIL testing |
| Protocol Compliance Checker | Verifies that ECU CAN behaviour conforms to the DBC specification and J1939/CANopen standards |
ECU Test Automation: Scaling Automotive ECU Testing
Manual automotive ECU testing — an engineer sending CAN messages and observing responses — is slow, error-prone, and impossible to scale across thousands of test cases. ECU test automation addresses this by scripting test sequences that run automatically: the ECU test automation framework injects stimuli, monitors ECU responses, compares results against expected values, and logs pass/fail outcomes without human intervention. Modern ECU test automation platforms can execute regression test suites overnight, ensuring that every new software build maintains ECU software validation coverage without delaying the development schedule.
ECU test automation is also how automotive ECU testing teams meet ISO 26262 functional safety requirements. Safety-critical software must achieve defined test coverage metrics — for ASIL D functions, 100% Modified Condition/Decision Coverage (MC/DC) is often required. Only ECU test automation can generate the test volume needed to achieve these metrics in reasonable time.
HIL Testing: The Gold Standard of Automotive ECU Testing
HIL testing represents the closest approximation to real vehicle operation achievable in a laboratory. A HIL testing rig places the actual ECU hardware in a loop with a real-time simulator that models the physical environment — engine thermodynamics, vehicle dynamics, sensor characteristics — and communicates with the ECU via real CAN wiring, power supply, and I/O signals. HIL testing allows engineers to test scenarios that are impossible or dangerous to create on a real vehicle: sensor failures, battery undervoltage, CAN bus disconnects, and high-temperature extremes. HIL testing with comprehensive CAN bus testing tools is the final ECU software validation gate before production sign-off.
Accelerate Automotive ECU Testing with Precisol Hardware
Whether you are setting up a bench for ECU software validation, building a HIL testing rig, or implementing ECU test automation for a new platform, Precisol Automation provides the CAN bus testing tools to support every stage. The CAN to USB Adapter delivers a reliable, high-speed connection between your ECU under test and your automotive ECU testing PC, with full CAN and CAN FD support for modern vehicle platforms. For data capture and automotive ECU testing log management, the CAN Data Logger provides standalone recording across multiple CAN channels with precision timestamping.
See how these CAN bus testing tools powered a full ECU software validation project in our ECU validation case study, or explore how Precisol hardware supports ECU simulator development for complete HIL testing environments.
Frequently Asked Questions
What are the stages of automotive ECU testing?
Automotive ECU testing follows the V-model: MIL (simulation only), SIL (compiled code in PC), PIL (target hardware with simulated I/O), and HIL testing (real ECU with real-time plant simulator). CAN bus testing tools become critical from SIL onwards in the ECU software validation process.
What CAN bus testing tools are needed for ECU software validation?
Core CAN bus testing tools for ECU software validation include a CAN USB interface, DBC signal database, CAN analyser/logger, ECU simulator, and protocol compliance checker. For HIL testing, a real-time simulator with CAN I/O boards is also required.
How does ECU test automation improve the validation process?
ECU test automation executes test cases repeatably without manual intervention, increasing coverage while reducing human error. Automated CAN bus testing tools can run complete regression suites overnight, achieving the test coverage metrics required for ISO 26262 functional safety compliance in automotive ECU testing.