CAN Bus Security: Protecting In-Vehicle Networks from Cyber Threats
02 July 2026
CAN bus security was not a design priority when Bosch developed the Controller Area Network standard in the 1980s. The protocol was built for reliability, determinism, and fault tolerance in closed, electrically noisy environments — not for defence against malicious actors. Decades later, modern vehicles are connected to cellular networks, Wi-Fi, Bluetooth, and the cloud, exposing previously isolated in-vehicle network security perimeters to external connected vehicle threats. As automotive cybersecurity becomes a regulatory requirement under standards like ISO/SAE 21434 and UNECE WP.29, understanding the specific vulnerabilities and mitigations in CAN bus security is essential for every automotive engineer and fleet operator.
Why CAN Bus Security Is Inherently Challenging
The CAN bus protocol has no built-in authentication, encryption, or message source verification. Any node connected to the CAN bus can transmit any message with any identifier — there is no mechanism for a receiving node to confirm that a CAN message actually came from the legitimate ECU associated with that identifier. This was an acceptable architectural compromise when the bus was physically isolated inside a vehicle and physical access was the only attack surface. Modern vehicles have changed this assumption entirely. The OBD-II diagnostic port provides direct, unguarded access to the main CAN bus from outside the vehicle. Telematics units connected to J1939 networks communicate over cellular. Infotainment systems bridge to vehicle control networks. Each connection is a potential entry point for connected vehicle threats that bypass in-vehicle network security.
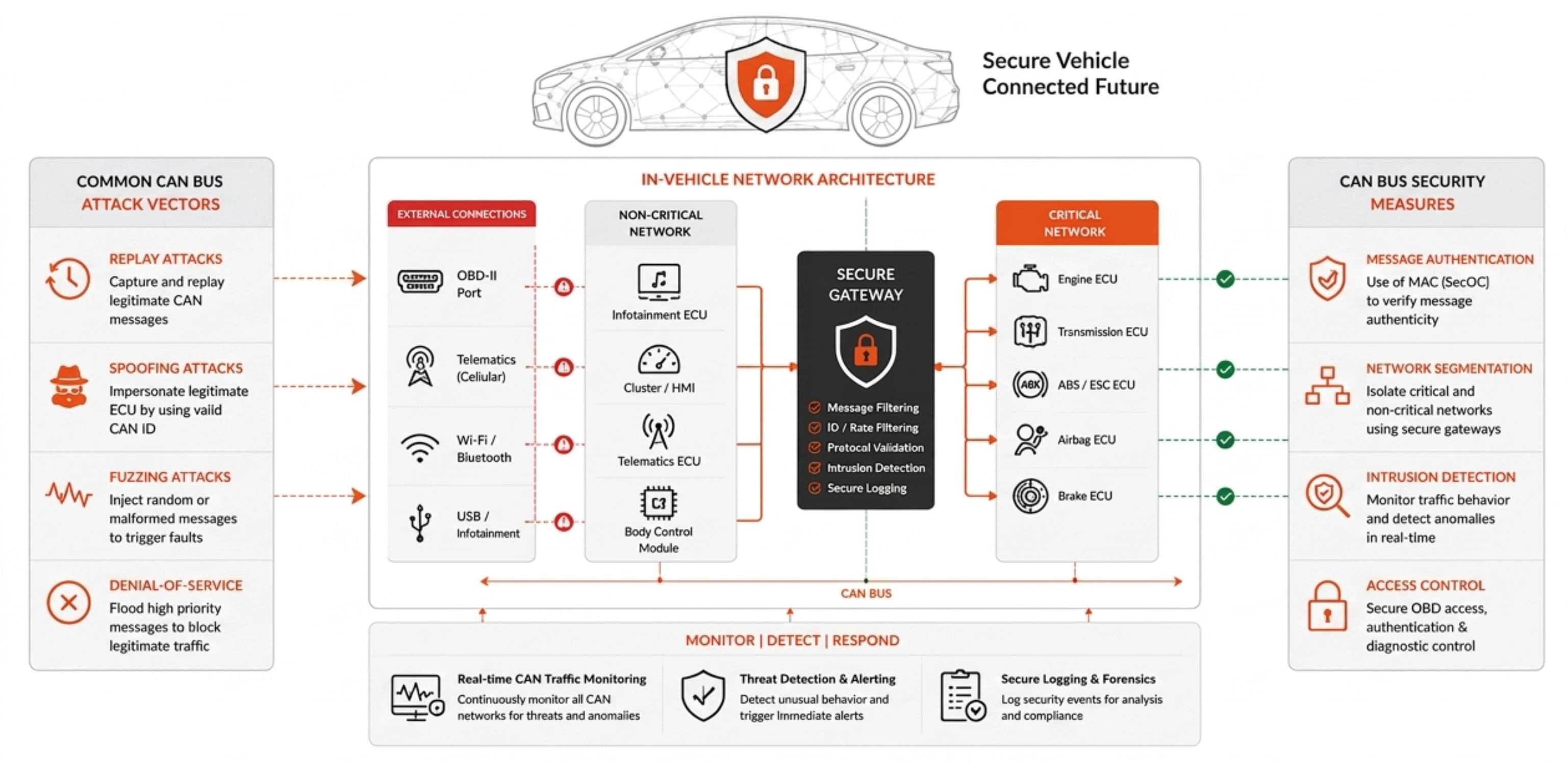
Common CAN Bus Security Attack Vectors
Automotive cybersecurity researchers have demonstrated several practical CAN bus security attacks, many of which require only a laptop and a CAN interface connected to the OBD-II port:
- Replay Attacks: An attacker captures legitimate CAN bus frames — say, the message that unlocks a door — and retransmits them later to trigger the same action. Replay attacks are a fundamental in-vehicle network security threat because the CAN bus protocol has no timestamp or sequence number to distinguish a fresh message from a replayed one.
- Spoofing Attacks: An attacker transmits CAN messages using a legitimate ECU's identifier, impersonating it on the bus. Because CAN bus security has no source authentication, receiving nodes accept the spoofed messages as genuine. A spoofed brake control message or airbag trigger is a critical safety risk.
- Fuzzing Attacks: Automated fuzzing tools inject thousands of randomly malformed CAN messages per second. Some of these connected vehicle threats trigger unexpected behaviour in ECU firmware — crashing nodes, corrupting memory, or unlocking privileged diagnostic modes.
- Denial-of-Service: CAN bus arbitration is priority-based: lower identifiers win. An attacker can flood the bus with high-priority messages (ID 0x000), preventing legitimate ECU communication and creating a CAN bus security denial-of-service that incapacitates the vehicle network.
Automotive Cybersecurity Standards Addressing CAN Bus Security
| Standard | Scope | Relevance to CAN Bus Security |
|---|---|---|
| ISO/SAE 21434 | Automotive cybersecurity engineering | Defines the cybersecurity lifecycle including CAN bus security risk assessment |
| UNECE WP.29 R155 | Regulatory cybersecurity requirement | Mandates automotive cybersecurity management systems for vehicle type approval |
| ISO 11898-2 | CAN physical layer | Defines in-vehicle network security considerations for transceiver design |
| SAE J3061 | Automotive cybersecurity guidebook | Provides CAN bus security threat modelling framework for OEMs |
Strategies for Improving CAN Bus Security
Comprehensive CAN bus security in modern vehicles requires a layered approach across hardware, firmware, and network architecture:
- Message Authentication Codes (MACs): Adding cryptographic MACs to CAN messages proves authenticity without changing the physical layer. Automotive cybersecurity implementations such as AUTOSAR SecOC (Secure Onboard Communication) implement MACs within the CAN payload, enabling receiving ECUs to verify message origin and protect against spoofing and replay connected vehicle threats.
- Network Segmentation and Gateways: Separating critical (powertrain, brakes) and non-critical (infotainment, telematics) CAN networks behind firewalled gateways is a fundamental in-vehicle network security architecture. The gateway filters messages between domains, preventing an attack on the entertainment network from propagating to safety-critical bus segments.
- Vehicle Intrusion Detection: Vehicle intrusion detection systems monitor CAN bus traffic against a baseline of expected behaviour. Anomalies — a message appearing at an unexpected rate, an identifier transmitted from the wrong address, or a payload format that deviates from the DBC spec — trigger vehicle intrusion detection alerts that can notify the fleet management platform or log evidence for forensic analysis.
- OBD-II Port Access Control: Physical security for the diagnostic port is the simplest CAN bus security measure. Locking OBD-II dongles, requiring authentication before diagnostic sessions, and disabling remote diagnostic access when not needed closes the most common in-vehicle network security entry point.
Secure Your Vehicle Networks with Precisol Automation
Building and validating CAN bus security architectures requires hardware that can simulate attacks, monitor traffic anomalies, and test vehicle intrusion detection systems under controlled conditions. Precisol Automation's CAN Bus Gateway provides the network segmentation and inter-domain filtering capability needed to implement secure in-vehicle network security architectures. The CAN Telematics Gateway includes secure cellular connectivity with encrypted data pipelines, protecting connected vehicle threats from propagating through the telematics channel.
Explore how CAN bus security principles protect real-world fleet deployments in our heavy truck fleet management case study, or discover how Precisol hardware supports automotive cybersecurity for electric vehicle fleet management with secure, authenticated telematics.
Frequently Asked Questions
Why is CAN bus security a concern in modern vehicles?
CAN bus security is a concern because the protocol was designed for closed networks with no authentication. Modern vehicles expose the CAN bus through OBD-II ports, cellular telematics, and Wi-Fi — creating in-vehicle network security vulnerabilities to connected vehicle threats that the original protocol was never designed to resist.
What are the most common CAN bus security attack vectors?
The most common CAN bus security attacks are replay attacks, spoofing, fuzzing, and denial-of-service flooding. All exploit the CAN bus protocol's lack of source authentication — a fundamental automotive cybersecurity limitation that SecOC and network segmentation strategies address.
How can vehicle intrusion detection protect a CAN bus network?
Vehicle intrusion detection monitors CAN bus traffic for anomalies — unexpected message rates, unknown identifiers, or payload deviations — that indicate connected vehicle threats. When detected, the vehicle intrusion detection system logs the event and can alert fleet operators or isolate the compromised network segment to limit in-vehicle network security damage.