CAN Bus vs LIN Bus: Choosing the Right Protocol for Your Vehicle Network
24 June 2026
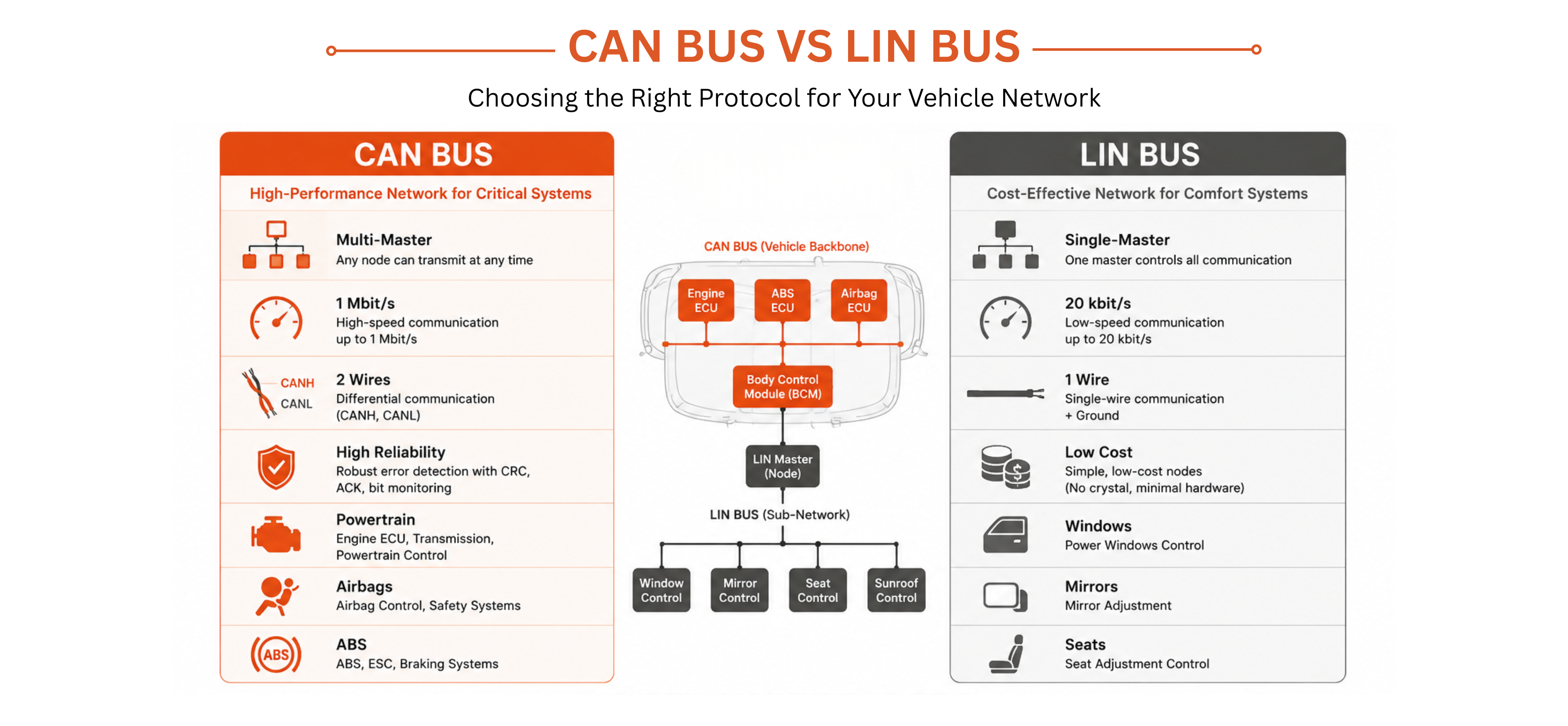
When designing a vehicle network, one of the earliest and most consequential decisions is choosing between CAN bus vs LIN bus. Both are established vehicle network protocols with decades of automotive deployment — but they serve fundamentally different purposes. The LIN bus protocol is a low-cost, single-master automotive serial protocol designed for slow, non-critical subsystems. CAN bus is a multi-master, high-speed vehicle network protocol built for real-time safety and powertrain ECU communication. Understanding when to use each — and when to use both — determines your network's cost, reliability, and scalability.
CAN Bus: The High-Performance Vehicle Network Protocol
CAN bus is the dominant vehicle network protocol for applications where speed, reliability, and real-time ECU communication matter. Operating at up to 1 Mbit/s, CAN bus supports multi-master access — any node can initiate communication at any time — and provides robust built-in error detection through CRC checking, bit monitoring, and acknowledgement mechanisms. These properties make it the vehicle network protocol of choice for powertrain management, ABS and ESC braking, airbag control, and transmission shifting, where millisecond-level response times and deterministic latency are non-negotiable.
CAN bus requires two wires (CANH and CANL) running as a differential pair and a 120-ohm termination resistor at each end. Its physical layer makes it highly resistant to electromagnetic interference — a critical advantage in an engine bay full of electrical noise. As an automotive serial protocol for safety-critical systems, CAN bus is referenced by international standards including ISO 11898 and forms the physical foundation for higher-layer vehicle network protocols such as J1939 and CANopen.
LIN Bus Protocol: The Cost-Efficient Alternative
The LIN bus protocol takes a radically different approach. It is a single-master, single-wire automotive serial protocol that operates at a maximum of 20 kbit/s. Every LIN bus protocol cluster has exactly one master node that controls all scheduling — slave nodes only respond when polled. This simplicity dramatically reduces the cost of the LIN bus protocol implementation: slave nodes require no crystal oscillator (they synchronise from the master's break field), need only a simple single-wire transceiver, and require far less silicon than a CAN node. For high-volume production vehicles, the LIN bus protocol can reduce per-node ECU communication hardware cost by up to 80% compared to CAN.
The LIN bus protocol is used extensively for body and comfort systems: electric window and mirror control, seat adjusters, sunroof motors, rain sensors, climate control vents, and steering column switches. These applications require infrequent ECU communication at low data rates where the deterministic latency and multi-master capability of CAN would be wasteful overkill. The LIN bus protocol standardised under ISO 17987 can connect up to 16 slave nodes per cluster.
CAN Bus vs LIN Bus: Direct Comparison
| Feature | CAN Bus | LIN Bus Protocol |
|---|---|---|
| Topology | Multi-master bus | Single-master, single-wire |
| Maximum Speed | 1 Mbit/s (Classic CAN) | 20 kbit/s |
| Wires Required | 2 (differential pair) | 1 + ground |
| Max Nodes | 32–110 per segment | 16 per cluster |
| Error Handling | Comprehensive (CRC, ACK, bit monitoring) | Basic (checksum) |
| Relative Node Cost | Higher | Lower |
| Typical Use | Powertrain, brakes, airbags | Windows, mirrors, seats |
Using CAN Bus and LIN Bus Together
In the CAN bus vs LIN bus decision, the answer for most modern vehicles is not one or the other — it is both. A typical architecture places one or more LIN bus protocol clusters under a LIN master node that is simultaneously a CAN bus node. The LIN master aggregates data from all its LIN slave nodes and forwards relevant information onto the main CAN bus vehicle network protocol. This hybrid approach delivers the best of both worlds: low-cost ECU communication for peripheral subsystems via the LIN bus protocol, and fast, reliable ECU communication for critical systems via CAN bus.
For example, a door control module might manage window, mirror, and lock motors via the LIN bus protocol internally, while reporting door status and receiving commands from the body control module over the CAN bus vehicle network protocol. This architecture is standard in premium passenger vehicles and is increasingly common in commercial vehicles as well.
Test and Bridge CAN Bus and LIN Bus Networks with Precisol
Whether you are integrating CAN and LIN in a new vehicle network or retrofitting ECU communication protocols, Precisol Automation provides the hardware to bridge, test, and analyse both. The LIN-CAN Gateway seamlessly translates between the LIN bus protocol and CAN bus, allowing LIN clusters to interact with CAN-based vehicle network protocol networks without custom firmware. For hardware-level protocol analysis, the CAN Bus Gateway provides flexible multi-protocol bridging across complex automotive serial protocol environments.
See these protocols in action through our automotive instrument cluster field testing case study, or explore how Precisol tools support automotive diagnostics across CAN and LIN networks.
Frequently Asked Questions
What is the key difference between CAN bus vs LIN bus?
CAN bus vs LIN bus comes down to speed and cost. CAN bus is a multi-master vehicle network protocol supporting up to 1 Mbit/s with strong error handling. The LIN bus protocol is a single-master automotive serial protocol running at up to 20 kbit/s, designed for cost-sensitive, non-critical ECU communication.
Can CAN bus and LIN bus coexist in the same vehicle?
Yes. Most modern vehicles use both protocols. CAN bus handles high-priority vehicle network protocol traffic while the LIN bus protocol manages slower, lower-priority subsystems. A LIN master node typically bridges between the LIN cluster and the main CAN bus ECU communication network.
Which is cheaper to implement: CAN bus or LIN bus?
The LIN bus protocol is significantly cheaper per node — single wire, simpler transceiver, no crystal oscillator needed in slaves. For high-volume applications with modest ECU communication requirements, the LIN bus protocol can reduce hardware cost per node by up to 80% compared to CAN bus.