CAN FD vs Classic CAN: Key Differences and When to Upgrade
23 June 2026
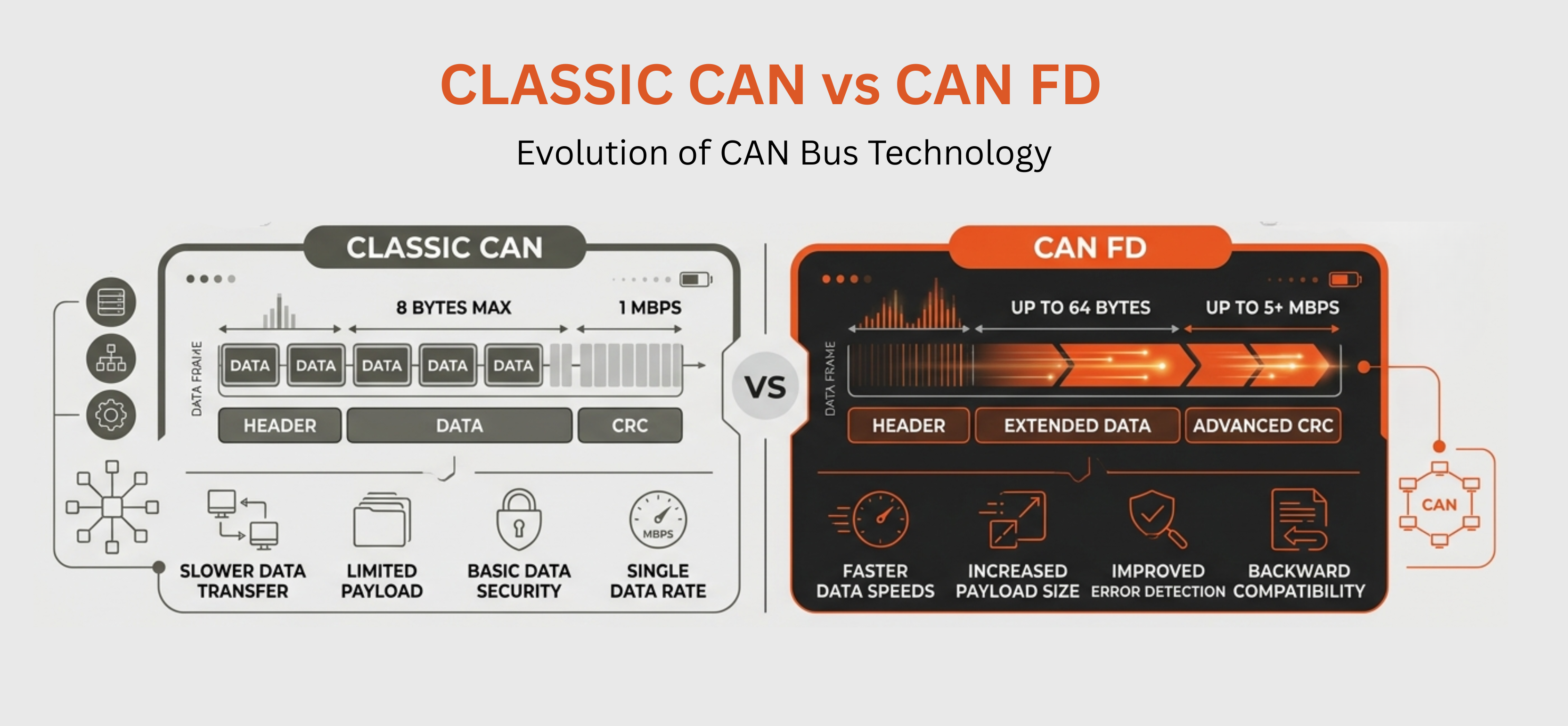
The CAN FD protocol — where FD stands for Flexible Data Rate — is a significant evolution of the original Controller Area Network standard. When comparing CAN FD vs classic CAN, the two most important differences are payload capacity and speed: classic CAN is limited to 8 bytes per frame at a maximum of 1 Mbit/s, while the CAN FD protocol supports up to 64 bytes per frame and a CAN FD data rate of up to 8 Mbit/s in the data phase. Understanding when and why to make this automotive network upgrade is critical for engineers designing next-generation vehicle and industrial networks.
The Limitations That Led to CAN FD
Classic CAN served the automotive industry remarkably well for decades, but the rise of ADAS, electrification, and over-the-air (OTA) software updates pushed its 8-byte payload and 1 Mbit/s ceiling to the breaking point. When comparing CAN FD vs classic CAN from a bandwidth perspective, consider a modern Battery Management System (BMS) that must transmit cell voltage data for 100 cells. In classic CAN, this requires dozens of separate frames. The CAN FD protocol handles this in just a few frames, dramatically reducing bus load and latency. This was the primary motivation for Bosch to develop the flexible data rate CAN standard, which was ratified as ISO 11898-1:2015.
CAN FD Protocol: How It Works
The CAN FD protocol introduces a two-phase bit timing structure. The arbitration phase — where bus access is negotiated between competing nodes — runs at the classic CAN speed (typically 500 kbit/s to 1 Mbit/s). Once a node wins arbitration and begins transmitting its payload, the bus switches to a faster CAN FD data rate for the data and CRC fields. This is the key architectural innovation of flexible data rate CAN: the same physical wiring supports both phases, meaning an automotive network upgrade to CAN FD does not necessarily require new cable infrastructure.
The CAN FD protocol also improves CRC (Cyclic Redundancy Check) coverage. Classic CAN uses a 15-bit CRC, while the CAN FD protocol uses a 17-bit or 21-bit CRC depending on payload length, providing substantially better error detection coverage for larger frames.
CAN FD vs Classic CAN: Side-by-Side Comparison
| Feature | Classic CAN | CAN FD Protocol |
|---|---|---|
| Maximum Payload | 8 bytes | 64 bytes |
| Arbitration Speed | Up to 1 Mbit/s | Up to 1 Mbit/s |
| CAN FD Data Rate (data phase) | Not applicable | Up to 8 Mbit/s |
| CRC Protection | 15-bit | 17-bit or 21-bit |
| Backward Compatibility | N/A | Not natively compatible |
| Typical Application | Body, powertrain, chassis | ADAS, BMS, OTA flashing |
Benefits of the CAN FD Protocol
- Higher Throughput Without New Wiring: The CAN FD data rate in the data phase can reach 8 Mbit/s on existing two-wire CAN infrastructure, making this automotive network upgrade cost-effective for many platforms.
- Reduced Frame Count: In CAN FD vs classic CAN, the 64-byte payload means far fewer frames are needed for the same data, lowering bus utilisation and reducing latency for all nodes on the network.
- Faster ECU Flashing: OTA firmware updates that previously required minutes over classic CAN can complete in seconds with the CAN FD protocol's higher CAN FD data rate, a critical benefit for automotive network upgrade projects targeting connected vehicle platforms.
- Stronger Error Detection: The improved CRC in the flexible data rate CAN standard catches more multi-bit errors in larger payloads, maintaining the high reliability for which CAN is known in safety-critical systems.
When Should You Upgrade to CAN FD?
In the CAN FD vs classic CAN decision, the upgrade makes sense when your network is hitting bandwidth or payload limits. Concrete triggers for an automotive network upgrade include: ADAS applications streaming radar or camera metadata, BMS designs monitoring large cell arrays, powertrain controllers requiring high-frequency torque feedback, and any platform targeting frequent OTA software updates. If your current network is lightly loaded and your payloads are consistently under 8 bytes, classic CAN remains perfectly adequate and the added complexity of flexible data rate CAN is unnecessary.
Migrating an existing system to the CAN FD protocol requires all nodes on a network segment to support CAN FD — classic CAN nodes cannot interpret CAN FD frames. This means an automotive network upgrade typically happens at the platform level rather than incrementally.
Evaluate CAN FD with Precisol Automation Tools
Before committing to an automotive network upgrade, engineers need tools that can capture, decode, and analyse both classic CAN and CAN FD protocol traffic side by side. Precisol Automation's CAN Bus Gateway supports both CAN and CAN FD protocol variants, providing a flexible bridge for mixed-network environments during migration. For hands-on protocol analysis and frame capture, the CAN to USB Adapter connects to any CAN FD-capable network and streams live data to your analysis workstation.
See flexible data rate CAN in action through our instrument cluster field testing case study, or explore how CAN FD protocol tools support EV vehicle field testing with Precisol hardware.
Frequently Asked Questions
What is the main difference between CAN FD vs classic CAN?
The key difference in CAN FD vs classic CAN is payload size and speed. Classic CAN is limited to 8 bytes per frame at up to 1 Mbit/s. The CAN FD protocol supports up to 64 bytes per frame and CAN FD data rates up to 8 Mbit/s in the data phase.
Is CAN FD protocol backward compatible with classic CAN?
No. CAN FD protocol frames cannot be transmitted on a classic CAN bus without causing errors. CAN FD controllers can be configured in compatibility mode, but a full automotive network upgrade to CAN FD requires all segment nodes to support the flexible data rate CAN standard.
When should I upgrade to CAN FD protocol?
Consider a CAN FD protocol upgrade when you need faster OTA flashing, larger sensor data payloads, or reduced bus load. ADAS, BMS, and electrification platforms are the most common candidates for this automotive network upgrade to flexible data rate CAN.